Kirigami soft robotic gripper







Description
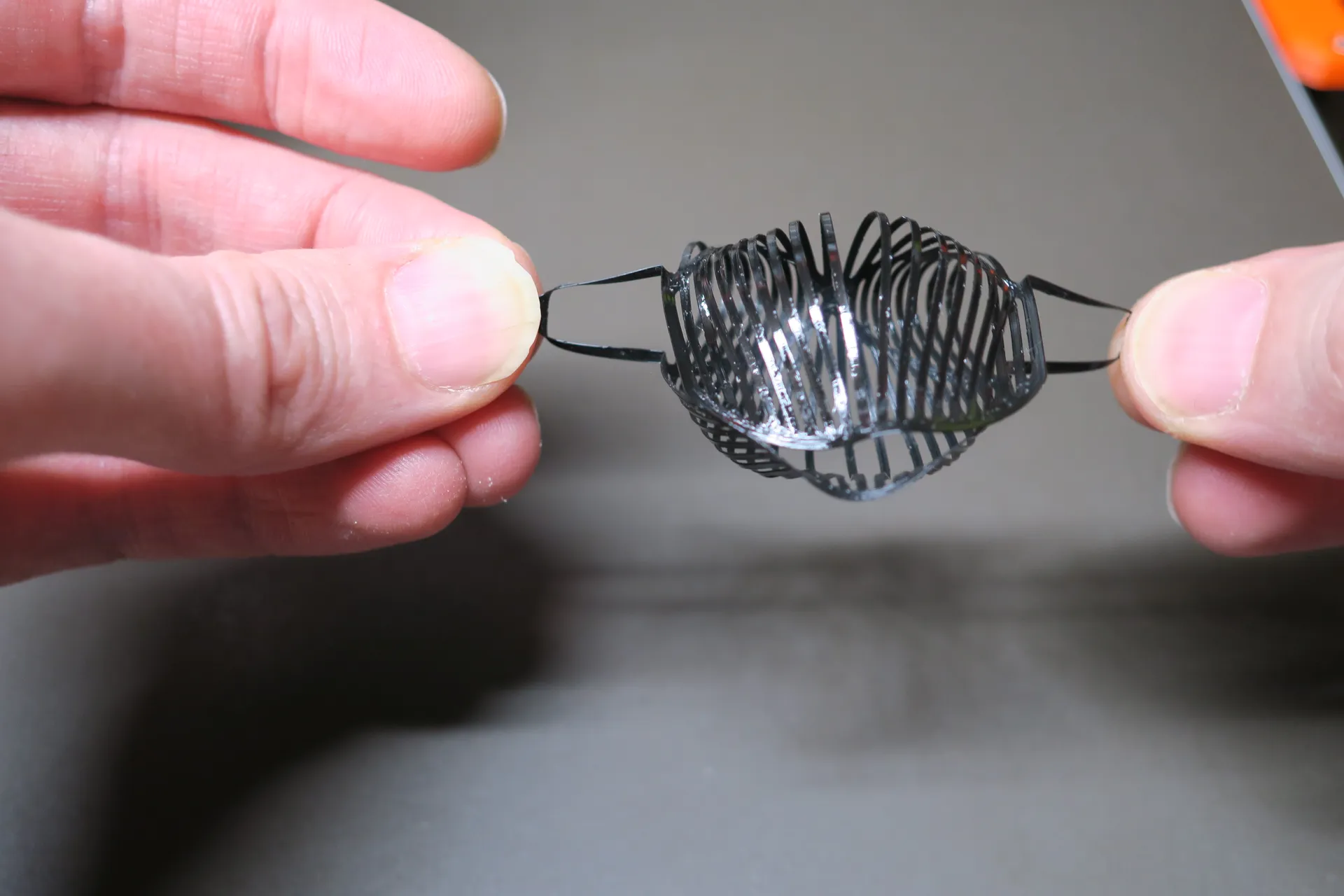
PDFI recently read about a kirigami-inspired soft robotic gripper developed at North Carolina State University, and I wanted to create an FDM 3D-printable version to play with. The full article about how it works was published in Nature: https://www.nature.com/articles/s41467-023-39741-6
Since the print is only a single layer thick, you will need a good first layer calibration, and you must have good bed-adhesion. I've tried printing it in both PLA and PETG, since the article mentions that the research design was laser-cut from a thin (127 micron) PET sheet. I wasn't able to get consistent extrusion with that thin of a first layer of PETG, but I found the default 0.2 mm (200 micron) first layer to be sufficient for experimentation with both PLA and PETG.
It took a lot of tweaking before I got it to slice well, print well, and not break as soon as I pulled on the ears, but I discovered some settings that make a huge difference. The Classic slicer works way better than the Arachne slicer, especially since it causes a tiny infill on each ribbon that acts like ironing (which isn't available on a single layer print). The random seam position is important for strength, as is slowing down the first layer by a lot to make sure everything is well bonded together, since you'll be pulling pretty hard on the two “ears” in order to get it to grip and lift objects. The print only weighs 0.4 grams, but it can gently grip, and easily lift objects many, many times its own weight.
Recommended print settings:
- Material: PLA or PETG
- Perimeters: 7
- Seam position: Random
- Perimeter generator: Classic
- First layer speed: 5mm/s
- Slice gap closing radius: 0mm
- Elephant foot compensation: 0mm
If you want all of these settings, you can just Open (not Import) the attached .3mf file, or use the attached gcode for PLA or PETG.
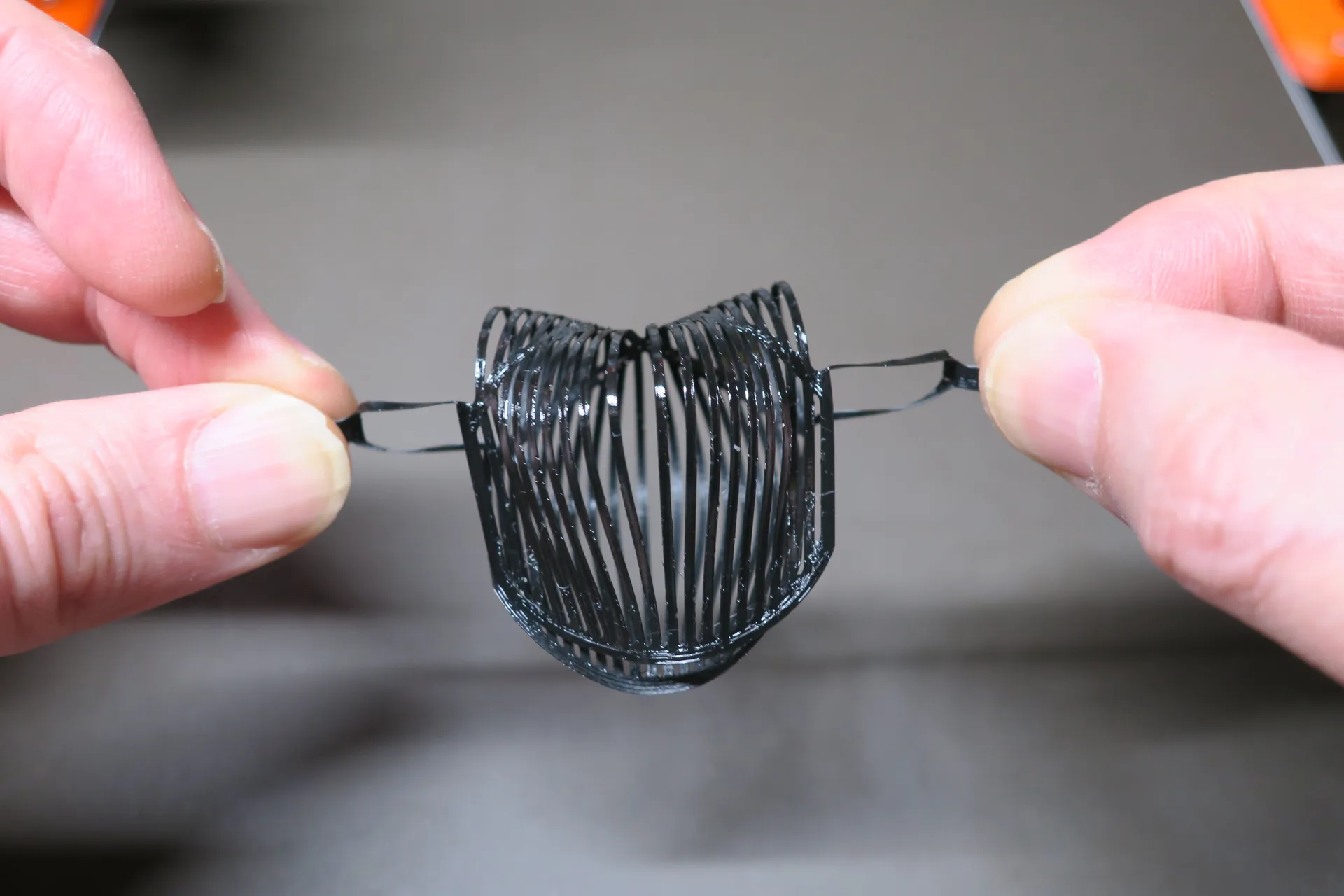
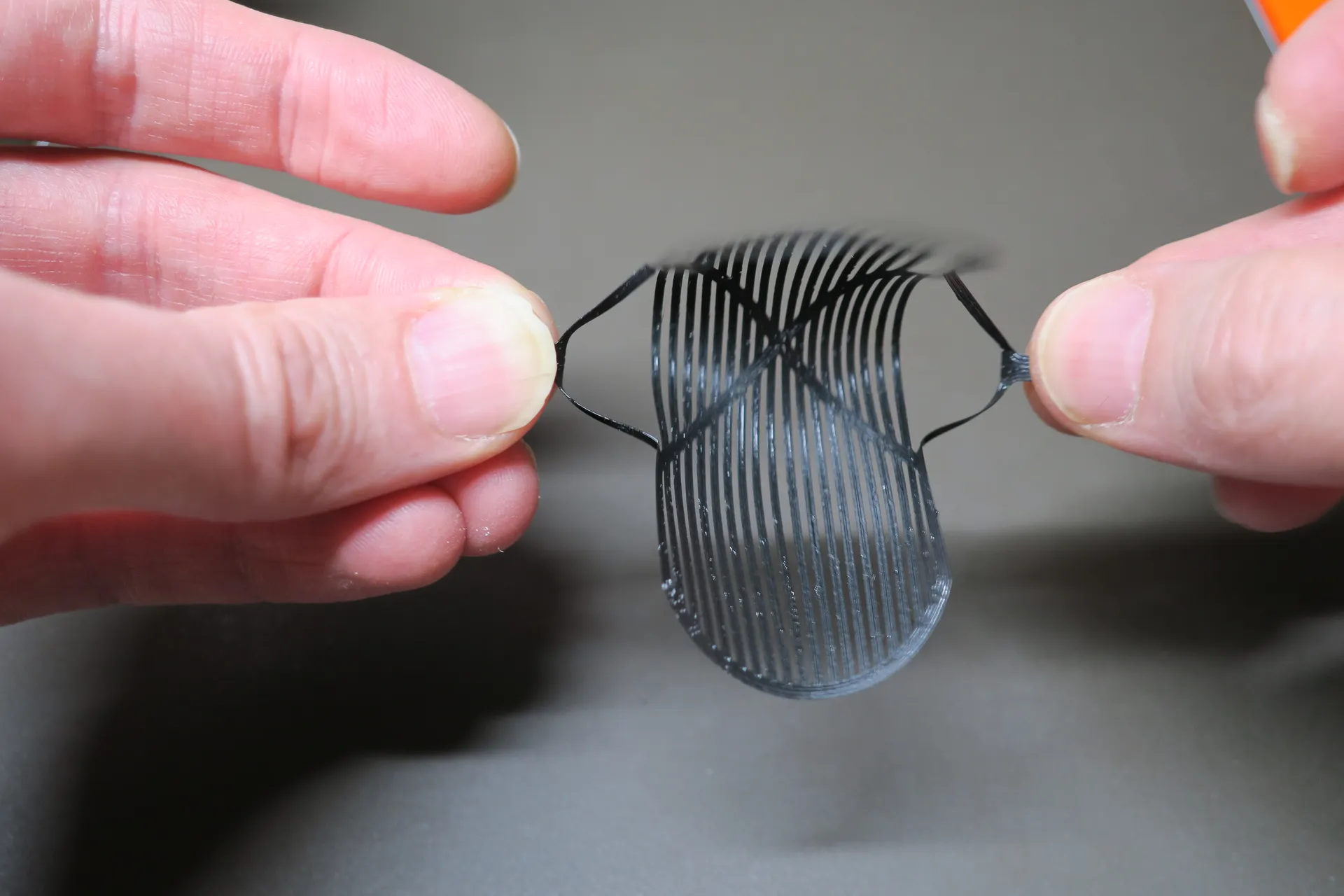
After printing:
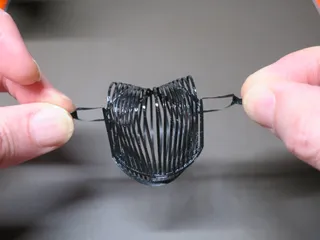
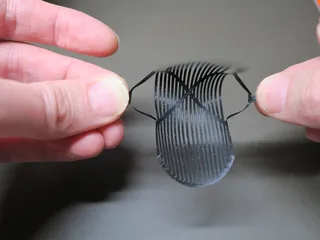
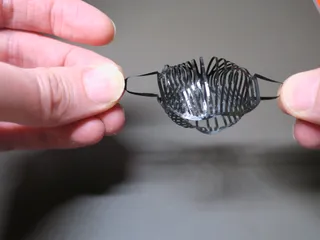
Let the print bed cool, then carefully lift it off so it does not get damaged, and then slowly pull the two ears apart to get it to curl into the gripper shape. When you let go of the ears, it should mostly return to its original shape. As long as you followed the above print settings to get a strong print, you should be able to pull pretty hard on the ears to get the deformation shown in the photos and you can get a secure grip on things. (Don't pull too hard, because it will eventually break!)
Be sure to check out NCSU's original video showing off their laser-cut grippers:
Article Citation:
Hong, Y., Zhao, Y., Berman, J. et al. Angle-programmed tendril-like trajectories enable a multifunctional gripper with ultradelicacy, ultrastrength, and ultraprecision. Nat Commun 14, 4625 (2023). https://doi.org/10.1038/s41467-023-39741-6
Tags
Model origin
The author marked this model as their own original creation.